ᛉPROJECTSESTUS
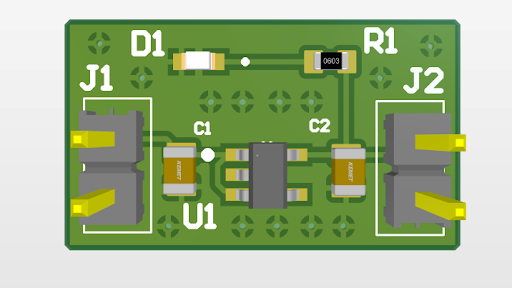
LDO Voltage Regulator PCB
What: Custom LDO regulator PCB for WARG's electrical onboarding bootcamp.
How: Full design flow in Altium: schematic, custom symbols, footprints, placement, routing, and DRC.
Result: Manufacturable board with zero DRC violations; DC bias verified with Murata SimSurface.
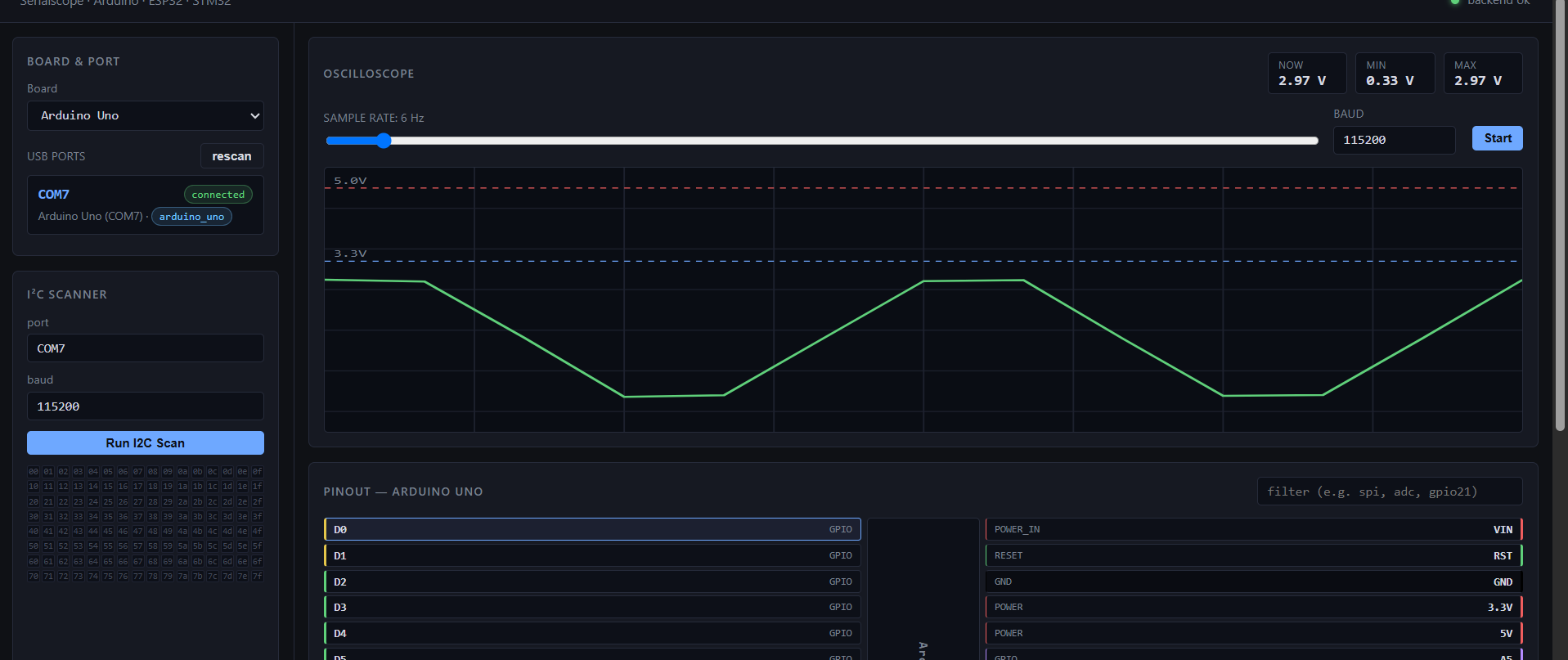
Serialscope
What: Web dashboard for breadboard hardware projects.
How: FastAPI backend over WebSockets; plain HTML/CSS/JS frontend; Arduino C++ firmware.
Result: Live oscilloscope, I²C scanner, and interactive pinout for Uno, ESP32, and STM32.
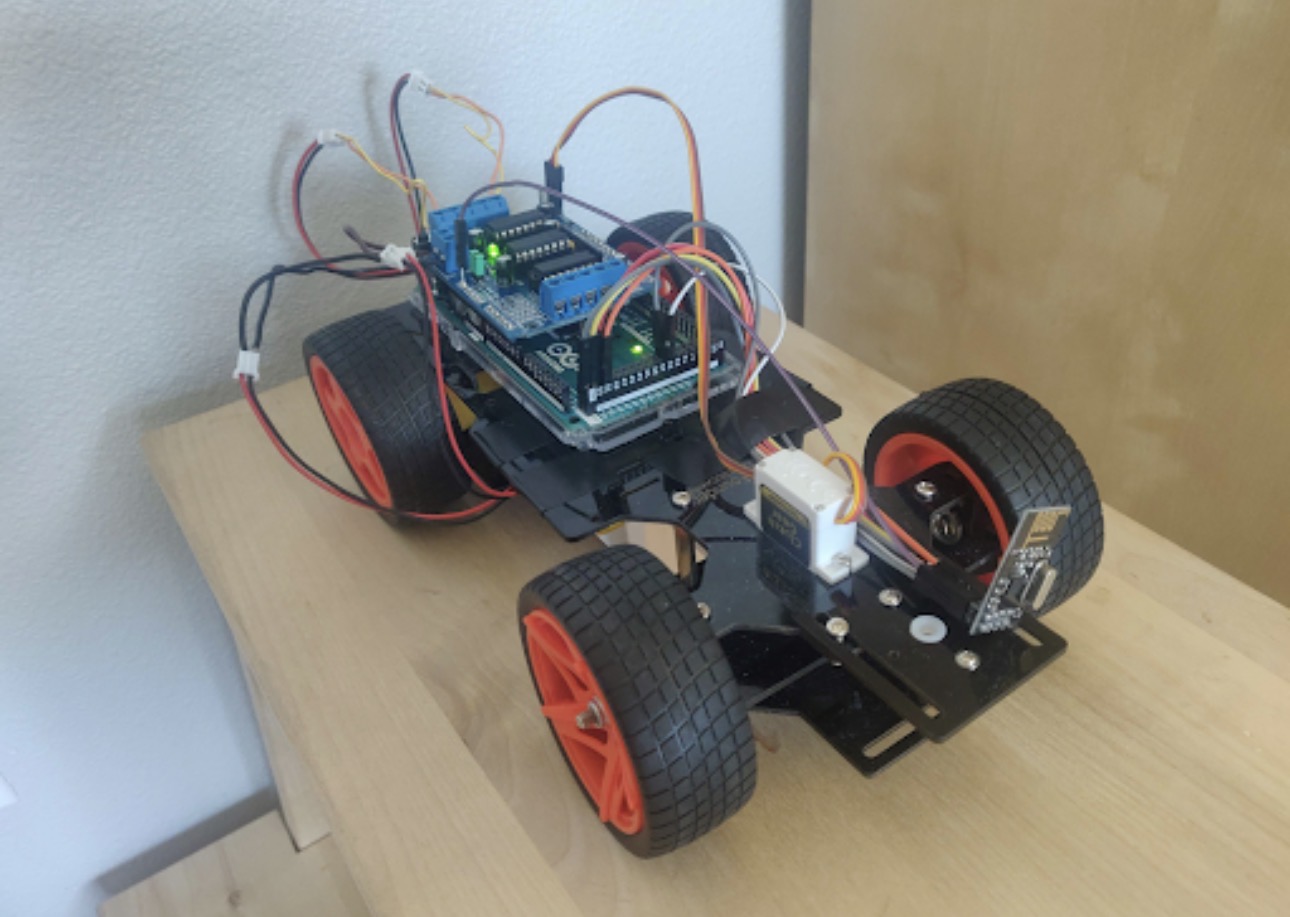
Arduino Radio Controlled Car
What: Fully wireless RC car with joystick control.
How: Two Arduinos + RF modules; custom C++ firmware.
Result: Stable up to 20 m, <5% packet loss, <100 ms latency.